Drei Sensortypen für Automotive-Anwendungen im Vergleich
Welche Rolle spielt Lidar für autonomes Fahren? Und welche Radar und Kamera? ein Vergleich
Dipl.-Ing. Gert Rudolph, Dipl.- Ing. Uwe VoelzkeDipl.-Ing. Gert Rudolph, Dipl.- Ing. UweVoelzke
(Bild: Fotolia)
Während Kamera- und Radarsysteme inzwischen in zahlreichen Fahrzeugen zu finden sind, steht Lidarsensoren der Sprung in den Massenmarkt noch bevor. Ein direkter Vergleich der Stärken und Schwächen der verschiedenen Technologien zeigt, welche Bedeutung die einzelnen Sensoren für das autonome Fahren haben.
Anzeige
Voll autonomes Fahren ab dem Jahr 2021/2022 nach Sicherheitslevel 4 oder 5 erfordert zwingend den Einsatz mehrfach redundanter Sensorsysteme – und hier kommt Lidar ins Spiel. Heute verfügbare Systeme für teilautonomes Fahren verwenden Radar- und Kamerasysteme in unterschiedlicher Anzahl und Auslegung. Hochauflösende, bezahlbare Lidarsysteme mit Reichweiten bis 300 m befinden sich noch im Vorentwicklungsstadium. Der Aufwand, Lidarsysteme mit der geforderten Performance zuverlässig und kostengünstig zu entwickeln, ist eine große Herausforderung.
Die Mehrheit der Automobilhersteller geht heute davon aus, dass für vollautonomes Fahren neben den bereits eingesetzten Kamera- und Radarsystemen ein weiterer unabhängiger Sensortyp benötigt wird. Der Artikel beschreibt die wichtigsten Eigenschaften der drei genannten Systeme, erklärt die Vor- und Nachteile und den heutigen Stand der Technik. Aus Herstellersicht wird aufgezeigt, welche Halbleiterbauteile erforderlich sind, um intelligente und kostenoptimierte Lösungen anbieten zu können.
Bild 1: Übersicht über die verschiedenen Automatisierungsstufen nach VDA/Bast, SAE.ST
In Bild 1 sind verschiedenen Abstufungen des autonomen Fahrens dargestellt. Diese Klassifizierung ist inzwischen sowohl im Standard J3016 der internationalen Ingenieurs- und Automobilindustrie-Vereinigung SAE als auch in Europa durch die Bundesanstalt für Straßenwesen und dem VDA festgelegt.
Anzeige
Aktuell gibt es keine zugelassenen Fahrzeuge nach Level 3. Der Gesetzgeber arbeitet noch an einer möglichen Zulassung solcher Fahrzeuge. Maßstäbe setzt hier der neue Audi A8, der Ende 2017 an die Kunden ausgeliefert wird. Hier ist kurzzeitiges autonomes Fahren unter bestimmten Rahmenbedingungen möglich. Dies Fahrzeug verwendet serienmäßig zusätzlich einen Lidarsensor.
Welche Sensoren sind nun für autonomes Fahren nach Level 1 bis Level 5 unbedingt erforderlich? Wie eingangs erwähnt, gibt es drei Hauptgruppen von Sensoren: Kamera-, Radar- und Lidar-basierende Systeme. Ultraschallsensoren sollen hier nicht betrachtet werden. Bei Einparkhilfen sind diese heute aus Kostengründen noch weit verbreitet, für autonomes Fahren aber von eher untergeordneter Bedeutung. Kamera- und Radarsysteme sind heute bei den Level-1- und Level-2-Fahrzeugen Stand der Technik und Voraussetzung für alle weiteren Automatisierungsstufen.
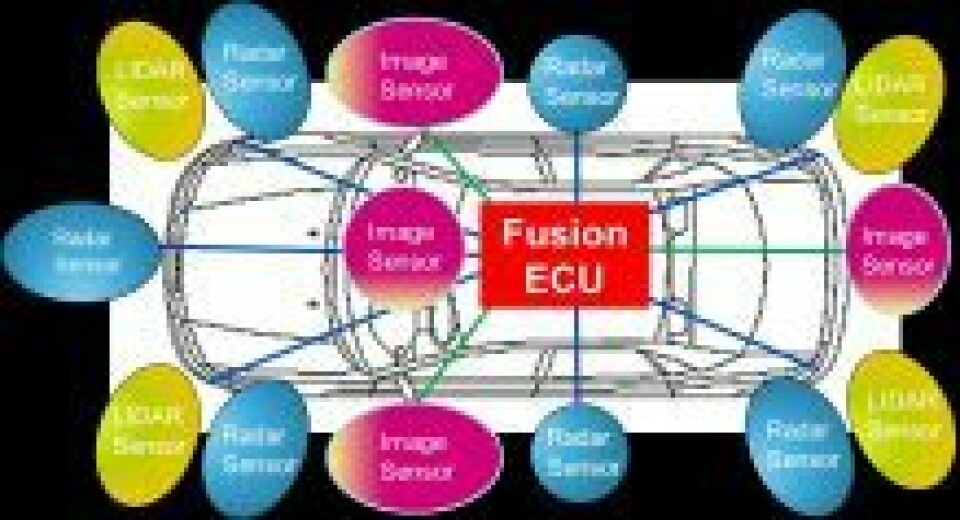
Bild 2: In modernen Fahrzeugen ist eine Vielzahl von Sensoren mit unterschiedlichen Technologien verbaut.ST
In Bild 2 sind exemplarisch mögliche Anzahl und Positionen dieser drei Sensoren dargestellt. Heute wird die Auswertung teilweise noch dezentral ausgeführt, zukünftig ist dafür eine extrem leistungsfähige „Fusion ECU“ zuständig.
Anzeige
Rückfahr- und 360°-Kameras
Videobilder sind die Informationsquelle mit den meisten Details für den menschlichen Fahrer, aber auch sehr gut geeignet als ein Eingangsparameter für das hochautomatisierte Fahren. Der Sinn von Rückfahrkameras und 360°-Kameras besteht im Wesentlichen darin, den Fahrer mit einer besseren Darstellung der Umgebung außerhalb des Fahrzeuges zu unterstützen. Heutzutage sind bereits Rückfahrkameras und 360°-Kameras im Einsatz, welche die zweidimensionale Projektion der Kamerabilder sowie die Überlagerung von zusätzlichen Informationen wie etwa die Lenkwinkeltrajektorien unterstützen. Für die automobile Oberklasse befinden sich erste Kameras mit virtueller dreidimensionaler Bilddarstellung in der Einführung.
Um die dreidimensionale Bilddarstellung, die in der Regel die Eingangssignale von vier bis sechs Kameras zusammenführt, möglich realistisch zu gestalten, muss insbesondere auf die Bildübergänge geachtet werden, um einen guten Übergang der einzelnen Signale zu haben und gleichzeitig keine Bildinformation zu verlieren.
Anzeige
Heutige automobile Video-Systeme wie beispielsweise Rückfahrkameras oder 360°-Kameras haben in der Regel eine zentralisierte Architektur. Das bedeutet, dass vier bis sechs Kameras die Rohdaten in ein zentrales Steuergerät übertragen, in dem diese dann prozessiert werden. Entsprechend hoch sind die Hardware-Anforderungen an den Video-Prozessor. Zusätzliche werden FPGAs für spezifische Hardwarebeschleunigung benötigt, sodass insgesamt eine hohe Verlustleistung anfällt. Darüber hinaus benötigen moderne Datenkompressionsverfahren zusätzlich große Datenspeicher.
Lidar: Was es ist, wie es funktioniert und was es kann
Bei diesen Kamerasystemen handelt es sich um Systeme für mittlere bis hohe Reichweiten, das heißt im Bereich zwischen 100 m und 250 m. Diese Kameras benutzen Algorithmen, um Objekte automatisch zu erkennen, zu klassifizieren und die Entfernung zu bestimmen. Erkannt werden sollen beispielsweise Fußgänger, Radfahrer, Kraftfahrzeuge, Seitenstreifen, Brückenpfeiler und Fahrbahnränder. Die Algorithmen werden darüber hinaus auch zur Verkehrszeichen- und Signalerkennung verwendet.
Anzeige
Kameras mit mittlerer Reichweite dienen im Wesentlichen zur Warnung vor Querverkehr, als Fußgängerschutz sowie für Notbremsung, Spurhalteassistenten und Signallichterkennung. Typische Anwendungsbereiche für Kameras mit hoher Reichweite sind Verkehrszeichenerkennung, videobasierte Abstandsregelung und Straßenführungserkennung.
Künftige Systeme werden versuchen, mittlere und hohe Reichweiten ausschließlich mit einer Optik abzudecken. Damit dieses gelingen kann, sind künftig Bildsensoren mit vermutlich mehr als sieben Millionen Pixeln notwendig.
Auf den nächsten Seiten sind Radar- und Lidarsysteme Thema.
Anzeige
Radarsysteme
ADAS-Systeme benötigen mehrere Radarsensoren, die auch in Zukunft nicht ersetzbar sind und entscheidend zur Gesamtfunktion des autonomen Fahrens beitragen. Heutige Radarsysteme basieren entweder auf 24 GHz oder auf 77 GHz. Die Vorteile der 77-GHz-Systeme liegen im Wesentlichen in der höheren Genauigkeit für die Entfernung- und Geschwindigkeitsmessung sowie in der exakteren Winkelauflösung. Weitere Vorteile gegenüber 24 GHz sind die geringere Antennengröße, sowie die geringere Interferenzproblematik.
Hauptsächlich unterscheidet man zwischen SRR-Applikationen und MRR/LRR-Applikationen). Zu den SRR-Applikationen gehören beispielsweise:
Anzeige
Blindspot detection (Totwinkel-Überwachung)
Spurhalte- und Spurwechselassistent
Rückschauendes Radar zur Kollisionswarnung beziehungsweise Kollisionsvermeidung
Parkassistent
Querverkehr-Überwachung
Beispiele für Radar basierte MRR/LRR-Applikationen sind:
Bremsassistent
Notbremsung
Automatische Abstandsregulierung
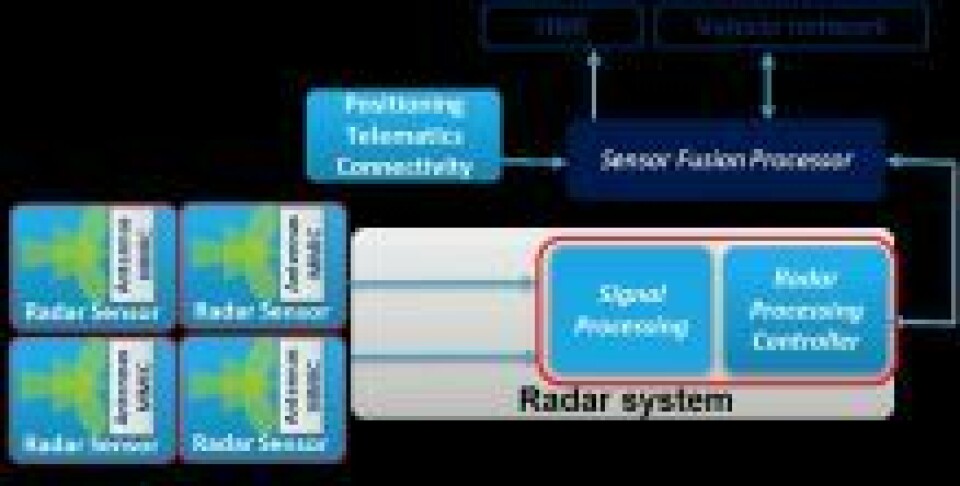
Bild 3: Raw-Radar-Sensoren liefern ungefilterte Rohdaten an den Prozess-Controller.ST
Bild 3 zeigt die Architektur eines Radarsystems mit mehreren Sensoren. In diesem Fall ist das Base Band im Radar-Prozess-Controller integriert. Die Radarsensoren liefern ungefilterte Rohdaten an den Prozess-Controller. Dieser Ansatz hat mehrere Vorteile. Zunächst bedeutet die Integration des Base Bands innerhalb des Prozess-Controllers, dass Siliziumfläche und damit verbundene Kosten eingespart werden.
Ein weiterer Vorteil besteht in der Verlagerung von Verlustleistung aus dem Radarsensor heraus in das Steuergerät. Da das Steuergerät sehr viel größeren Bauraum als der Radarsensor bereitstellen kann, ist es an dieser Stelle einfacher, die Verlustleistung zu beherrschen. Schließlich bietet der Zugriff auf ungefilterte Rohdaten des Radarsensors sehr viel mehr Möglichkeiten zur Signalverarbeitung und Flexibilität, da keine Informationsverluste in Form von Filterung und Kompression auftreten.
Voraussetzung für die Entwicklung von MMICs-Sensoren sind dedizierte Hochfrequenztechnologien für Frequenzen von 24 GHz beziehungsweise 77 GHz, um die entsprechenden Ausgangsleistungen realisieren zu können. Für den HF-Teil werden heute SiGe-Heterobipolartransistoren verwendet, und für die Logikintegration sind 130-nm-CMOS-Prozesse monolithisch verfügbar. Die 24-GHz-MMICs, die bei ST bereits seit einigen Jahren in Produktion sind, wurden in einer ST-BiCMOS9-Technologie realisiert. Die Entwicklung der 77/79-GHz-Bausteine erfolgt in BiCMOS9MW-Technologie, eine Nachfolgetechnologie mit ebenfalls 130 nm minimaler CMOS-Strukturbreite.
Für zukünftige Radarsysteme für noch höhere Frequenzen wie etwa 122 GHz ist bereits eine von ST entwickelte 55-nm-Technologie verfügbar. Diese Technologie stellt SiGe-Heterobipolartransistoren mit einer Transitfrequenz von mehr als 320 GHz zur Verfügung und bietet die Möglichkeit, die entsprechende CMOS-Logik zu integrieren.
Zukünftige Radarsensoren könnten als SoC in einer bereits heute verfügbaren 28-nm-SOI-Technologie (Silicon-on-Insulator) realisiert werden. Sowohl die Radarsensoren als auch die Base-Band-Funktionalität lassen sich so monolithisch integrieren. Insbesondere im Hinblick auf die zuvor dargestellten Vorteile eines Radar-Rohdatensensors muss noch untersucht werden, ob eine höhere Integration in diesem Fall sinnvoll ist.
Auf der nächsten Seite stehen Lidarsysteme im Fokus.
Lidar
Lidar ist ein relativ neues System im Automobilbereich und hat erst in letzter Zeit an Bedeutung gewonnen. Die meisten System- und Halbleiterhersteller arbeiten heute an neuen und verbesserten Lösungen mit einem Serieneinsatzziel 2020/21.
Die im Titel gestellte Frage lässt sich aus heutiger Sicht eindeutig beantworten: Lidarsysteme sind für voll autonomes Fahren ab Level 3 eine wichtige Voraussetzung. Mehrfach redundante Kamera- oder Radarsysteme erhöhen zwar die Zuverlässigkeit. Doch Objekte, die das erste Radar/Kamerasystem womöglich systembedingt nicht erfasst, erfasst auch das zweite nicht. Hier braucht es einen weiteren Sensor – und das ist Lidar.
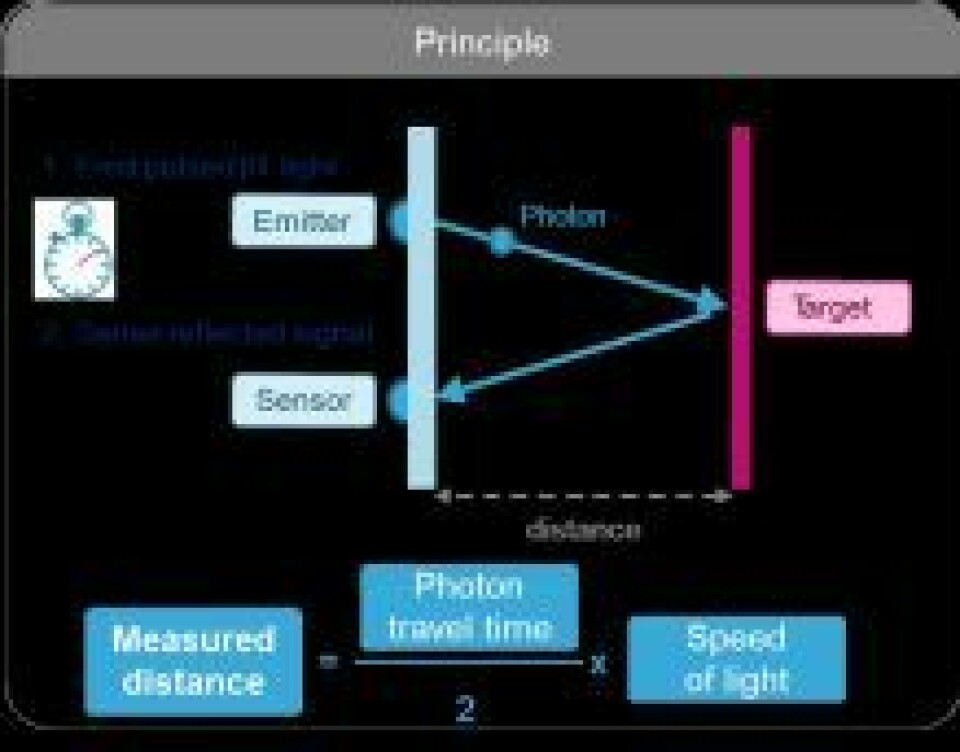
Bild 4: Prinzip einer Lidar-Entfernungsmessung.ST
Was ist Lidar? Lidar ist die Abkürzung für Light Detection and Ranging und ist ein Laser-basierendes System. Neben dem Sender (Laser) ist ein äußerst empfindlicher Empfänger erforderlich (Bild 4). Primär soll das System Entfernungen zu ruhenden und bewegten Objekten messen, aber auch durch besondere Verfahren dreidimensionale Bilder der erkannten Objekte liefern. Heute käufliche Entfernungsmesser, die dieses Prinzip verwenden und ausreichend genau die Entfernung bis zu einigen Metern bestimmen können, findet man in jedem Baumarkt.
Lidar im System
Die Herausforderung für ein Fahrerassistenzsystem besteht jedoch darin, die Funktion unter allen möglichen Umgebungsbedingungen (Temperatur, Sonneneinstrahlung, Dunkelheit, Regen, Schnee) zu gewährleisten und vor allem Objekte zu erkennen, die bis zu 300 m entfernt sind. Und das bei möglichst kleinem Bauraum und bei Kosten, die einen Großserieneinsatz ermöglichen.
Lidarsysteme sind nicht neu und seit vielen Jahren in der Industrie und im Militärbereich im Einsatz. Dabei handelt es sich um komplexe mechanische Spiegelsysteme, die eine 360-Grad-Rundumsicht ermöglichen und räumliche Bilder von Objekten aufnehmen können. Diese mechanischen Systeme mit Kosten von mehreren Zehntausend Euro sind für den Großserieneinsatz im Automobilbereich nicht geeignet.
Heute gibt es zwei generelle Trends am Markt, wie Infrarot-Lidarsysteme realisiert werden: als Rotating Laser (eventuell zukünftig mithilfe von MEMS) oder als „Solid State“-Lidar. Die vom Laser gesendeten und vom Objekt (Target) reflektierten Lichtstrahlen soll durch einen speziellen Sensor erkannt werden. Diese Detektoren müssen extrem empfindlich und in der Lage sein, einzelne Photonen zu messen. Stand der Technik ist heute die Verwendung einer SPAD-Technologie.
An beiden Systemen wird heute intensiv gearbeitet. Aus Sicht eines Halbleiterherstellers sind technisch die erforderlichen Halbleiter realisierbar, wobei die Fläche des benötigten SPAD-Arrays nicht unerheblich ist. Auch für die Ansteuerung und die Realisierung der Laserdioden-Arrays sind neue Verfahren und Technologien erforderlich, um das Kostenziel von unter 100 Euro zu erreichen. Entsprechende MEMS sind ebenfalls in der Entwicklung.
(ku/av)
Eck-DATEN
Fahrerassistenzsysteme, die autonomes Fahren ab Level 3 ermöglichen, benötigen zukünftig mindestens drei wesentliche Sensortypen: Kamera-, Radar- und Lidarsysteme. Während bei Kamera- und Radarsensoren entsprechende Halbleitertechnologien bereits heute zur Verfügung stehen, ist die Entwicklung bei den Lidarsystemen noch eine große Herausforderung. Eine genaue Vorhersage, welche Systeme sich hier durchsetzen werden, ist zurzeit schwierig. Aus Halbleitersicht scheint der Solid-State-Ansatz bei Lidar am vielversprechendsten zu sein.