Warum Lidar bei hohen Geschwindigkeiten unverzichtbar wird
Dr. Thomas LuceDr. ThomasLuce
Anders als Kameras und Radar kommt Lidar mit hohen Geschwindigkeiten und wechselnden Lichtverhältnissen klar. Daher besitzt die Technologie hohes Potenzial für autonome Fahrzeuge.(Bild: AdobeStock 588210938, EdNurg)
Lidar-Sensoren sind ein wichtiger Bestandteil von Fahrerassistenzsystemen (ADAS). Insbesondere bei hohen Geschwindigkeiten kann Lidar im Vergleich zu Kameras und Radar punkten. Welche ADAS-Funktionen profitieren am meisten von Lidar?
Anzeige
Autonomes Fahren der Stufe 5 soll in Zukunft ein komplett systemgesteuertes Führen des Fahrzeugs ohne Zutun und Eingreifen der Insassen ermöglichen. Doch bis dies Realität wird, wird noch viel Zeit ins Land gehen. Dennoch ebnen aktuelle Fahrerassistenzsysteme den Weg dorthin. Sie entwickeln sich in rasantem Tempo weiter und bieten immer ausgefeiltere Funktionen, um die Sicherheit und den Komfort beim Fahren zu erhöhen. Bekannte Beispiele hierfür sind die adaptive Abstands- und Geschwindigkeitsregelung (ACC), der Spurhalteassistent, das autonome Notbremssystem und viele weitere Technologien.
Für eine reibungslose Funktionsweise benötigen die Systeme eine große Menge an Daten aus verschiedensten Quellen und Sensortypen (Sensordatenfusion). Diese basieren auf unterschiedlichen Technologien wie etwa Radar oder Ultraschall. Auch hochauflösende Kameras kommen standardmäßig zum Einsatz – beispielsweise für die automatische Erkennung von Verkehrszeichen oder Hindernissen. Diese Sensorsysteme stoßen jedoch in manchen Anwendungsfällen an ihre Grenzen und können im Rahmen von ADAS-Lösungen nicht immer ein maximales Sicherheitsniveau im Straßenverkehr garantieren.
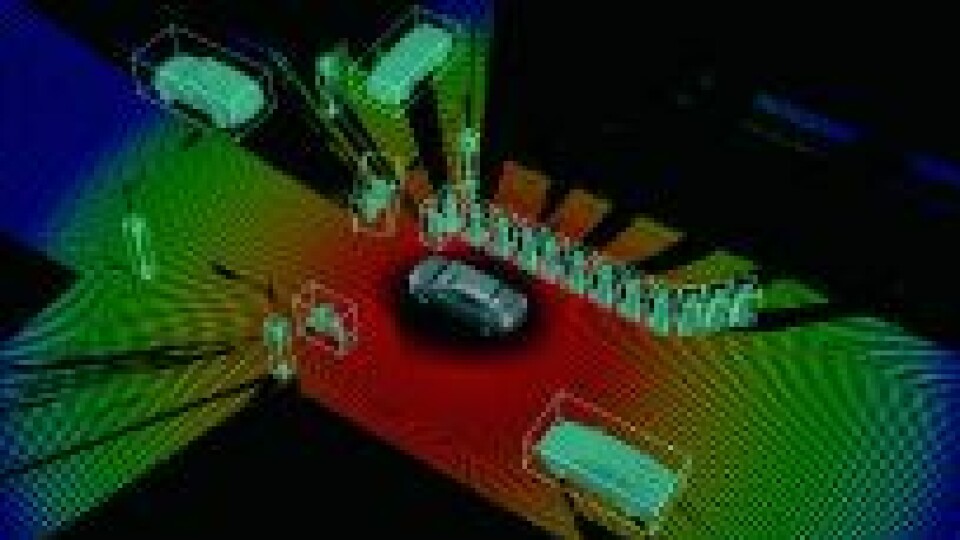
Lidar-Sensoren sind in der Lage, plötzlich auftretende Hindernisse schnell zu erkennen, damit Assistenzsysteme direkt reagieren können, unabhängig von Lichtverhältnissen.(Bild: Microvision)
Lidar: Was es ist, wie es funktioniert und was es kann
Herausforderung Autobahn-Tempo und Lichtverhältnis
Anzeige
Zum Tragen kommt dies etwa, wenn auf Autobahnen mit hohen Geschwindigkeiten von 130 km/h und mehr gefahren wird. Hierbei haben Assistenzsysteme nur sehr wenig Zeit, um richtig zu reagieren und eine adäquate Aktion wie einen Bremsvorgang oder einen Spurwechsel einzuleiten. Dies gilt beispielsweise dann, wenn ein vorausfahrendes Fahrzeug unvermittelt vor einem anderen Auto einschert. Auch das Einbiegen eines Fahrzeugs mit geringem Tempo auf eine Autobahn kann zu kritischen Situationen führen. Zudem können instabile Lichtverhältnisse die Leistung von Fahrerassistenzsystemen beeinträchtigen, wenn diese von herkömmlichen Sensortypen mit Daten gespeist werden. Kamerasysteme etwa reagieren empfindlich auf Wettereinflüsse wie Nebel, Regen oder Schneefall und liefern dann möglicherweise keine verlässlichen Ergebnisse.
Eine weitere Herausforderung für ADAS sind Straßentunnels. Hier verändert sich die Stärke des Umgebungslichts beim Ein- oder Ausfahren abrupt. Kameras verhalten sich dabei ähnlich wie das menschliche Auge, das auf wechselnde Lichtverhältnisse träge reagiert. So besteht das Risiko, dass Objekte im Tunnel, z. B. langsam fahrende Autos oder sonstige Hindernisse, zu spät erkannt werden, was die Unfallgefahr erhöht. Sind die Tunnels zudem unzureichend beleuchtet, lassen sich auch einbiegende Fahrzeuge oft nur zeitverzögert identifizieren. Darüber hinaus offenbaren Kameras zusätzliche Schwächen: Sie erlauben nur einen 2D-Blick in ein dreidimensionales Szenario und können lediglich ein sehr eingeschränktes Sichtfeld unmittelbar vor dem Fahrzeug überblicken. Zudem geraten Objekte bei plötzlichen Veränderungen wie einem Spurwechsel schnell aus dem Blickfeld der Kamera. Auch Radarsysteme bieten in Tunneln keine hundertprozentig verlässliche Leistung, da deren Signale durch die Betonwände gestört werden können.
Entfernungsmessung auf Basis der Lichtlaufzeit
Anzeige
Die Nachteile von konventionellen Sensorsystemen gleichen heutige Lidar-Technologien (Light Detection and Ranging) aus. Dies kommt vor allem bei hohen Geschwindigkeiten zum Tragen. Lidar-Systeme arbeiten nach dem Time-of-Flight-Prinzip. Hierbei werden Lasersignale von den Sensoren ausgestrahlt und von Objekten im Sichtfeld reflektiert. Die Messung des Abstands zu dem jeweiligen Objekt erfolgt dann auf Basis der Lichtlaufzeit (Time of Flight). Dabei handelt es sich um die Zeitspanne, die das Licht benötigt, um eine bestimmte Distanz zu überwinden. Entscheidend für die Berechnung des Abstands zum Objekt ist also der Zeitunterschied zwischen der Versendung und dem Empfang des Lichts. Lidar-Systeme sind mit Steuergeräten ausgestattet, welche die Messwerte in elektrische Signale umwandeln und auswerten. Ähnlich wie ein Radarsystem nutzt auch die Lidar-Technologie elektromagnetische Wellen, sendet diese jedoch in einem anderen Frequenzbereich aus. Da der Lidar-Sensor das gleiche Signal empfängt, das er selbst ausgesendet hat, handelt es sich dabei um einen sogenannten aktiven Sensor.
Scannt ein Lidar-System die Umgebung, generiert es eine hochauflösende Punktwolke. Wird an einer bestimmten Position ein Objekt reflektiert und im Sensor registriert, lässt sich dies durch einen Punkt exakt beschreiben. Die Wolke definiert sich dann durch die Gesamtheit der Punkte in einem räumlichen Koordinatensystem aus X-, Y- und Z-Achse. Dadurch kann die Technologie relevante Objekte und Hindernisse auf der Fahrbahn verlässlich orten. Zudem lässt sich die Straße eindeutig in befahrbare und nicht befahrbare Sektoren unterteilen. Auf Basis dieser Daten entsteht ein präzises, dreidimensionales Abbild der Fahrzeugumgebung, das vom Fahrerassistenzsystem genutzt werden kann. Dabei lassen sich auch exakte Echtzeitwerte für die Distanzmessung zu Objekten einbeziehen, was die Technologie so interessant für Hochgeschwindigkeitsanwendungen macht. Ein weiterer entscheidender Vorteil von Lidar ist, dass sich auch über größere Entfernungen alle Arten von Hindernissen wie langsam fahrende Autos, verlorene Ladungsgegenstände oder Fußgänger präzise erkennen lassen. Die Art und Beschaffenheit der Straße spielt dabei keine Rolle.
Scannt ein Lidar-System die Umgebung, generiert es eine hochauflösende Punktwolke. Wird an einer bestimmten Position ein Objekt reflektiert und im Sensor registriert, lässt sich dies durch einen Punkt exakt beschreiben.(Bild: AdobeStock 161144560, Design Science Tech)
Der Markt für Lidar-Lösungen ist von einer großen Vielfalt geprägt und bietet unterschiedliche Arten von Systemen: Prinzipiell lassen sich diese in scannende und nicht-scannende Sensoren einteilen. Unter den scannenden Systemen sind mechanische und nicht-mechanische Lidar-Typen erhältlich. Bei der mechanischen Variante werden in erster Linie motorisierte Spiegel zur Strahlablenkung eingesetzt. Allerdings kommt es hier – wie bei mechanischen Systemen üblich – zu einer gewissen Abnutzung und damit zu höheren Messtoleranzen. Darüber hinaus führen die mechanischen Bewegungen häufig zu ungenauen Ergebnissen. Dazu kommen weitere Nachteile: So stehen die großen Abmessungen mechanischer Komponenten häufig einem breiten Einsatzspektrum in der Praxis entgegen. Zudem verursacht die Produktion mechanischer Teile in der Regel hohe Kosten, was die Rentabilität infrage stellt.
MEMS-Technologie vermeidet mechanisch bewegliche Teile
Verglichen mit den rein mechanischen Systemen überzeugen unter den scannenden Lidar-Varianten die sogenannten Mikro-Elektro-Mechanischen Systeme (MEMS) mit größeren Vorteilen. Bei dieser Technologie, die auch als Solid-State-Lidar bekannt ist, bewegen sich die Spiegel nicht mithilfe von Motoren. Vielmehr erfolgen die Bewegungen hier auf Basis elektromagnetischer Schwingungen innerhalb ihrer Elastizitätsgrenzen. Dadurch entfallen bei dieser Technologie alle mechanisch beweglichen oder gelagerten Teile, sodass die oben genannten Nachteile mechanischer Lösungen nicht mehr zum Tragen kommen. Auch können die Systeme auf Silizium-Wafer-Basis produziert werden, was die Einbauhöhe verringert und die Kosten senkt. Allerdings kann es bei hohen Temperaturschwankungen erforderlich werden, das System komplett neu zu kalibrieren. Wie bei Radar-Systemen gibt es auch bei scannenden Solid-State-Lidar-Sensoren phasengesteuerte Varianten. Deren Produktion ist jedoch mit besonderen Herausforderungen verbunden: So ist es erforderlich, die Emitter des Arrays mit hoher Genauigkeit zu fertigen. Dieser Umstand ist der kurzen Wellenlänge des Lichts geschuldet. Schon kleinste Ungenauigkeiten wirken sich hier negativ auf die Präzision des Systems aus.
Anzeige
Zu den wichtigsten nicht-scannenden Lidar-Systemen zählt dagegen die Flash-Technologie: Diese ist mit einem Kamerablitz vergleichbar, der die gesamte Umgebung ausleuchtet. Hierbei muss jedoch bei großer Reichweite die Intensität des Laserblitzes erhöht werden. Wichtig dabei: Die Lichtstärke des Lasers darf das menschliche Auge nicht verletzen. Um dies sicherzustellen, sollte auf ein ausgewogenes Verhältnis aus Flash-Stärke und Sensitivität des Fotodetektors geachtet werden. Als praktikabel erweist sich hierbei beispielsweise ein Focal Plane Array (FPA), der das reflektierte Licht der gesamten Szene detektiert. Dieser erfasst nach dem gleichen Prinzip wie eine analoge Kamera ein zweidimensionales Bild, das vom Objektiv direkt auf die Bildebene projiziert wird. Dabei eignet sich die Flash-Technologie vor allem für kürzere Reichweiten.
Lidar erkennt Objekte über große Entfernungen
Ob scannende oder nicht-scannende Lidar-Varianten – die Technologie hat in jedem Fall ein großes Potenzial und wird in Zukunft mehr und mehr den Weg in aktuelle Fahrzeuge finden. Denn gegenüber Radarsystemen kann Lidar mit einigen wesentlichen Vorteilen punkten: So nimmt der Sensor aufgrund der kürzeren Wellenlänge auch sehr kleine Objekte und Hindernisse auf der Straße exakt wahr – und das sogar über größere Entfernungen von mehreren hundert Metern. Dabei ist das System dank der detailgenauen Erfassung und hohen Auflösung in der Lage, viele verschiedene Gegenstände trennscharf zu identifizieren. Ein weiterer Vorteil: Werden mehrere Sensoren oder scannende Lidar-Systeme mit beweglichen und von Motoren angetriebenen Spiegeln verwendet, lässt sich ein vollständiges 360-Grad-Blickfeld erfassen. So bleiben keinerlei Hindernisse mehr verborgen, was die Sicherheit insbesondere bei hohen Geschwindigkeiten auf eine neue Stufe stellt. Und schließlich kann Lidar auch bei schwankenden Lichtbedingungen seine Vorteile gegenüber Kameras ausspielen. So ermöglicht die Technologie gleichbleibend verlässliche Erkennungsergebnisse – bei intensivem Sonnenlicht ebenso wie bei kompletter Finsternis. Dadurch lassen sich auch in schwach beleuchteten Tunnels Hindernisse sicher identifizieren, was die Leistung entsprechender Fahrerassistenzsysteme deutlich verbessert.
Anzeige
Der Lidar-Sensor MAVIN mit dynamischer Reichweite verfügt über geringe Latenz, hohe Reichweite und ermöglicht eine hohe Auflösung.(Bild: Microvision)
MicroVision bietet mit MAVIN eine Lidar-Technologie, die ADAS-Lösungen unterstützt. Der MEMS-basierte Sensor ist mit einem Halbleiter-Laser ausgestattet und arbeitet mit einer Wellenlänge von 905 Nanometern. Mit 13 Millionen Bildpunkten pro Sekunde ist eine eindrucksvolle Erkennungsleistung im Nah-, Mittel- und Fernbereich gewährleistet, wobei eine maximale Reichweite von bis zu 220 Metern möglich ist. Eine ultrahochauflösende Punktwolke mit einer Bildwiederhol-Frequenz von 30 Hertz sorgt für eine niedrige Latenz. Der Lidar-Sensor ist in der Lage, gleichzeitig 16 Bildpunkte aus den verschiedenen Entfernungsbereichen beim Aussenden eines Laserstrahls zu erfassen. Fahrerassistenzsysteme profitieren damit von sehr kurzen Reaktionszeiten, was auch bei hohen Geschwindigkeiten für Sicherheit sorgt. (na)
Dr. Thomas Luce
Vice President Business Development bei MicroVision